
Autor: Guillermo Gefaell, Ingeniero Naval
 Desde 1998 las embarcaciones de recreo vendidas en la Unión Europea deben cumplir con la Directiva 94/25/EC, recientemente modificada por la Directiva 2003/44/EC, que establece y normaliza los criterios de seguridad constructivos que deben cumplir tales embarcaciones con esloras comprendidas entre 2,5 y 24 m.
Desde 1998 las embarcaciones de recreo vendidas en la Unión Europea deben cumplir con la Directiva 94/25/EC, recientemente modificada por la Directiva 2003/44/EC, que establece y normaliza los criterios de seguridad constructivos que deben cumplir tales embarcaciones con esloras comprendidas entre 2,5 y 24 m.
En España esta última Directiva ha sido transpuesta a nuestra legislación mediante el real Decreto 2127/2004, que sustituye y anula al anterior 297/1988.
Para el cumplimiento de tales exigencias, la Directiva hace referencia a una serie de estándares ISO (International Standard Organization), la mayoría de ellos ya armonizados en la Unión, entre los que se cuenta el ISO 12217 (Secciones 1, 2 y 3) que establece los criterios de seguridad relacionados con la geometría de la embarcación, su peso y posición del C de G del mismo, esto es con la estabilidad. La intención de la norma es garantizar unas cualidades marineras mínimas para
cada una de las Categorías de Diseño que la Directiva establece, y que son:
Para mejor ejemplificar lo que significan las diferentes alturas de ola, podemos a ver una figura, cuyo uso ha sido gentilmente permitido por la excelente revista “Professional Boatbuilder” (www.proboat.com) sobre las alturas de ola para las Categorías A y B.
Me voy a referir aquí únicamente a las embarcaciones a vela mayores de 6 metros de eslora de casco, cuyas exigencias de estabilidad, flotabilidad y francobordo se encuentran normadas en la ISO 12217-2, que exige también el cumplimento de otros estándares ISO, principalmente el de Datos Principales (8666), Bañeras (11812) y Portillos, Ventanas y Escotillas (12216).
Estas normas fueron desarrolladas por un comité técnico en el seno de la ISO, el Technical Committee (TC) 188. Este comité estaba compuesto por un amplio grupo de especialistas de varias nacionalidades y provenientes de oficinas de diseño y de organizaciones que previamente habían desarrollado otros estándares, tales como, por ejemplo, el Royal Ocean Racing Club (RORC) y la Royal Yachting Association (RYA).
Por tanto la ISO 12217 no es el primer intento de evaluar las cualidades marineras de una embarcación (lo que en inglés se denomina “seaworthiness”).
Veamos algunos.
Tradicionalmente los diseñadores de embarcaciones de recreo han venido empleando una serie
de coeficientes específicos (además de los tradicionales de bloque, prismático, etc.), que podíamos llamar “clásicos” para medir las cualidades
marineras y las prestaciones de un velero, que, sin constituir un cuerpo de doctrina, han permitido evaluar de una forma sencilla el comportamiento esperable de las embarcaciones a vela en función de unos pocos datos básicos. Entre estos coeficientes, que se calculan en unidades inglesas, son los más relevantes los siguientes:
desplazamiento/eslora (Displacement Length Ratio), superficie-vélica/desplazamiento (Sail Area Displacement Ratio), índice de estabilidad (Stability Index), que relaciona el período de balance con la manga, coeficiente de confort de movimientos (Comfort Ratio), coeficiente de aceleración de rolido (Roll Acceleration Index) y finalmente el índice de seguridad al vuelco (Capsize Screening Formula), que determina la capacidad de un velero para poder ser considerado como oceánico, que fue introducido por el Cruising Club of America a raíz del desastre de la Fastnet en 1979.
No vamos a entrar aquí en el análisis de estos índices y coeficientes, que se escapa del objeto de este trabajo. 
Quien esté interesado en una clara y exhaustiva explicación de estos y otrosmuchos, con su formulación, puede visitar las interesantes páginas:
http://www.dan.pfeiffer.net/boat/ratios.htm
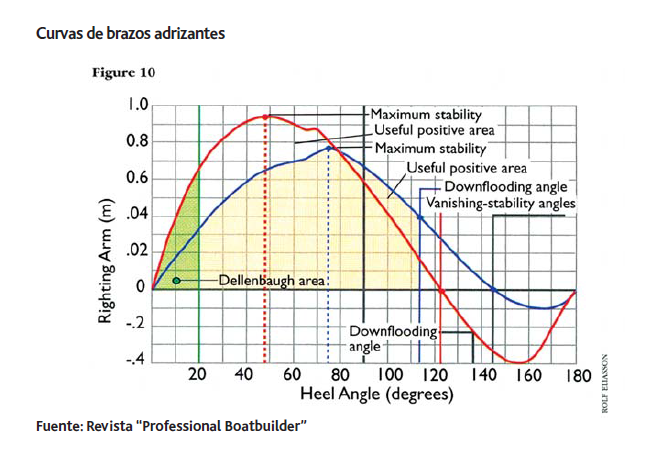
El método del ángulo de Dellenbaugh, también usado en paralelo con los anteriores, compara el momento adrizante con un momento escorante producido por un viento en la región de los 15 nudos (presión = 1 libra/pie2). Cuanto más pequeño el ángulo obtenido, se supone que la embarcación tiene más estabilidad inicial y es más segura, pero este método no nos dice nada sobre el ángulo de inundación, la capacidad de recuperarse de una “tumbada” de 90º (knockdown) o el ángulo al que la estabilidad positiva se anula (Angle of Vanishing Stability,AVS, en inglés).
El ángulo de Dellenbaugh es más bien un indicador de la capacidad de aguantar vela arriba y del mayor o menor confort de los movimientos en condiciones de navegación normales, que una forma de determinar las características de seguridad de una embarcación.
El Nordic Boat Standard, en uso en los 90, era un extenso cuerpo normativo que cubría la construcción y equipamiento de embarcaciones menores de 15 metros. Su apartado sobre estabilidad trataba de los requerimientos de francobordo y un valor del AVS no inferior a 130º.
Parece ser que este último requerimiento no era siempre debidamente comprobado, porque no se solía disponer de curvas de estabilidad, si no que era un
valor estimado.
Las reglas de rating del IMS utilizan los resultados obtenidos de una experiencia de estabilidad y, en base a ellos estiman un valor para el AVS.
Una de las razones por las que las normas ISO no adoptaron este sistema sin más, es que el IMS realiza los cálculos de estabilidad suponiendo una cubierta
corrida entre los trancaniles de la embarcación, esto es sin considerar elevaciones o depresiones de cubierta, como bañeras, casetas, etc.
Este método sirve bien en embarcaciones de regata en las que el pequeño volumen positivo de la caseta contrarresta más o menos el volumen negativo de la bañera. Pero el rango de embarcaciones cubiertos por la ISO es tan variado que las cubiertas y superestructuras deben ser tomadas en consideración, para poder obtener resultados fiables.
Las diferencias en el AVS pueden llegar a ser del orden de 30 grados entre el método ISO y el IMS.
Otro estándar ampliamente utilizado es el reglamento de la British Marine and Coast Guard Agency (MCA) “The Safety of Small Commercial Sailing Vessels – A Code of Practice”, desarrollado entre 1993 y 2001.
Este método ya se parece más al de la ISO 12217, no solo estableciendo límites para el AVS si no incorporando otros requerimientos adicionales que caracterizan la seguridad de la embarcación desde el punto de vista de la estabilidad. Para embarcaciones menores de 15 metros toma la forma de un numeral denominado STOPS (Sail Training Operacional Screen) que desarrolló la RYA o bien un numeral denominado Stability Safety and Screening (SSS) desarrollado por el RORC.
Pero este método de la MCA solo es obligatorio para embarcaciones de vela en servicio comercial en el Reino Unido y otros países de habla inglesa, y la aproximación que hace al AVS tampoco es suficientemente buena para la gran variedad de embarcaciones de recreo existente en el mercado.
En España se han utilizado los criterios de la Circular 7/95 de la DGMM durante muchos años, exigiendo un estudio completo de estabilidad para las embarcaciones mayores de 12 m de eslora, con estudio de las condiciones de carga correspondientes a buques de pasaje, y unos criterios más simples para las menores de esa eslora, para las que además se establecen unas normas de francobordo y flotabilidad.
Se complementan estos criterios con unos del SNAME en el que se estudia el efecto de unas presiones de viento de 3,5, 6,5 y 16 kg/m2, y se solicita que se informe del ángulo para el que el trancanil se sumerge (para las mayores de 12 m).
Estos criterios aún están en vigor para los casos de autoconstrucción por aficionado.
A finales de 1991, John Moon, a la sazón jefe de la oficina de mediciones del RORC, presentó al grupo de trabajo sobre estabilidad del ISO TC 188 la idea de establecer también un numeral que reflejase las condiciones de estabilidad de las embarcaciones y su seguridad desde este punto de vista.
Esto fue recibido con alguna desconfianza y el grupo continuó buscando puntos de encuentro sobre los ángulos mínimos de inundación y de anulación de los brazos positivos de estabilidad.
Era imposible que aquel grupo de 20 ó 30 personas de varios países, todas ellas con buenas razones para mantener sus propios criterios, se pusiese de acuerdo.
Así que se formó un subgrupo de cuatro personas: El promotor de la idea, John Moon,el profesor Peter van Oossanen de Holanda, Gregoire Dolto, de Francia, y Rolf Eliasson, de Suecia.
Este grupo desarrolló un sistema basado en un numeral, elaboró y afinó las fórmulas correspondientes y validó sus resultados en función de una extensa base de datos obtenidos de cientos de embarcaciones existentes.
Sus resultados se propusieron al grupo ISO TC 188 y, después de varias discusiones, finalmente se llegó a la actual redacción del estándar ISO 12217-2 y, dentro de él, al Índice de Estabilidad, STIX, que hoy nos ocupa.
El concepto subyacente del STIX es la definición de un índice o numeral, que se obtiene de las medidas principales de cada embarcación y su curva de brazos de adrizamiento GZ. Diferentes características del diseño que son importantes para las cualidades marineras de una embarcación y su seguridad, se identifican y expresan en forma de una serie de factores que se multiplican para obtener el numeral STIX.
Estos factores varían alrededor de la unidad, que denota un valor “normal” para la embarcación en cuestión.Valores inferiores a 1 indican características peores y mejores los superiores.
El principio básico del STIX es que la seguridad de una embarcación depende de muchas características, que contribuyen de forma diferente e incluso a veces trabajan en direcciones opuestas.
La fórmula del STIX es la siguiente:

Cada uno de los factores se calcula con unas fórmulas en las que intervienen datos importantes de la estabilidad de la embarcación, y tienen unos límites inferior y superior para cada uno de ellos.
Veremos a continuación lo que significan y como trabajan cada uno de estos factores.
Pero antes de continuar, vamos a ver primero los valores mínimos del STIX para cada Categoría de Diseño.
Son los siguientes:

Pasemos ahora al estudio detallado de los factores:
Factor de Eslora Base, LBS
En primer lugar tenemos el factor LBS (Base Length Factor), que es solamente función de la eslora total y la eslora en flotación de la embarcación.
LBS = (LH + 2 LFL)/3
El hecho de que en la fórmula se prime a la eslora en flotación LFL (multiplicándola por 2) sobre la eslora total LH, presenta algunas peculiaridades.
Si bien es verdad que la eslora en flotación es importante para el rendimiento de un velero desde el punto de vista de la velocidad, sin embargo en condiciones de muy mala mar, cuando se producen importantes escoras, a veces hasta de 90º, el tener lanzamientos a proa y a popa proporciona flotabilidad adicional, importante en condiciones de supervivencia.
Por tanto parecería que debería ser la eslora total y no la de flotación la que primase desde el punto de vista de la seguridad.
Esta duda la planteó Rolf Eliasson (recordemos que es uno de los padres del STIX) ya en su día, pero al final la fórmula quedó en su formato actual.
Por otra parte este peso mayor de la eslora en flotación proporciona algunos trucos para el diseñador:
Para embarcaciones de vela que se encuentran muy en los límites entre Categorías de Diseño, se puede conseguir pasar a la categoría inmediatamente superior simplemente maximizando la eslora en flotación.
Esto tiene una notable repercusión económica en la comercialización de un velero: No es lo mismo tener un STIX de 31,9 que uno de 32,1.
En el primer caso estaríamos en categoría de Diseño B, por lo que, en España al menos, no se despacharía la embarcación para navegar a más de 60 millas de costa (Zona de navegación 2), mientras que en el segundo caso estaríamos en Categoría A y sería despachable para navegación oceánica (Zona de navegación 1).
Es importante reseñar que el valor del componente (7 + 2,25 x LBS) es un número que es del orden de la eslora ce casco de la embarcación medida en pies.
El resto de factores modifican en más o en menos esta cifra básica, por lo que el STIX es, en definitiva, un numeral con dimensión de longitud.
La idea subyacente es que el tamaño es importante para la seguridad de una embarcación,
ya que cuanto mayor es, menor es el efecto relativo de las olas sobre ella.
Si todos los demás factores del STIX tuviesen el valor de la unidad, es decir es una embarcación que el método considera “normal”, el STIX coincidiría así aproximadamente con la eslora de la embarcación en pies, lo que de una manera rápida nos puede dar una pista sobre las cualidades marineras de tal embarcación.Valores del STIX iguales o superiores a la eslora en pies son deseables e indican, en principio, unas buenas cualidades marineras.
La regla general del STIX es que cuanto más alto, mejor.
Veremos más adelante un ejemplo de embarcaciones actuales y sus índices.
Factor de estabilidad dinámica, FDS
El área bajo la curva de momentos adrizantes hasta un cierto ángulo representa el trabajo que las fuerzas externas (olas y viento) deben realizar para escorar la embarcación hasta ese ángulo.
Esta área se debería utilizar en este factor, medida hasta el ángulo AVS (ΦV) o el ángulo de inundación (ΦD), en su caso.
Sin embargo se puede apreciar que lo que se utiliza para el cálculo de este factor no es el área bajo la curva de momentos adrizantes, si no la correspondiente a la de brazos adrizantes (momentos divididos por el desplazamiento).
La razón para ello es que el tamaño de la embarcación ya se ha utilizado para el establecimiento de los factores LBS, FDL y FBD, por lo que
sería volver a insistir sobre lo mismo. Por ello el uso de la curva de brazos, en vez de la de momentos,
que no depende del tamaño (desplazamiento), parece más adecuado.

Si el ángulo de inundación es menor que el ángulo AVS, el área debe ser calculada solo hasta este último punto.
Las aberturas susceptibles de servir de punto de inundación son: el acceso principal de personas al interior del velero, el punto más bajo de la brazola de una bañera no autoachicante o una abertura del casco o cubierta, una ventilación, por ejemplo, que permita inundación progresiva.
Para embarcaciones con bañera autoachicante y aberturas con cierre estanco o cuyo
tamaño esté dentro de los límites marcados por la norma ISO 12216, el punto más usual de inundación
es la esquina superior de la escotilla principal de acceso desde la bañera al interior.
Esto es porque al escorarse la embarcación, este punto se convierte en el punto bajo de la abertura.
Para embarcaciones pesadas este ángulo suele estar próximo a 110º, mientras que para las ligeras este valor se incrementa hasta unos 120º o más.
Si la escotilla no está centrada, hay que considerar la banda a la que se produce el menor ángulo.
La influencia del ángulo de inundación es importantísima en el STIX y lo hace variar de una forma muy significativa.
Manteniendo todos los demás parámetros iguales, este ángulo por si solo puede también ser la diferencia entre cumplir o no cumplir con una categoría de diseño dada.
Paradigmático es el caso de los excelentes motoveleros clásicos de una reconocida marca nórdica, para los que, incluso para su unidad mayor, de 44 pies, no se consigue la Categoría de Diseño A (Oceánica) simplemente porque las puertas laterales de acceso a la caseta de gobierno no son estancas (son deslizables) y se consideran como puntos de inundación.
Factor de recuperación a inversión, FIR
Este factor es una medida de la capacidad de un yate para recuperarse de una inversión sin ayuda externa.
La característica principal que se evalúa es el ángulo para el que se da la anulación de la curva de brazos GZ, el ya mencionado AVS.
Como se puede apreciar son fórmulas simples, especialmente la de aquellas embarcaciones con un peso superior a 40 toneladas métricas, para el que
el FIR es proporcional directamente al AVS hasta los 100º de escora.
Esto significa que si el AVS es de 90º, el FIR será de 0,9.
Para embarcaciones menores de este peso se incrementan las exigencias de AVS. Por ejemplo, para una embarcación de 8 toneladas el AVS requerido para que FIR sea igual a 1 es de 120º.
Una vez más el criterio es que es más difícil para una embarcación pequeña sobrevivir en malas condiciones de tiempo.
Factor de Recuperación a una “tumbada”,FKR
Este factor se refiere a la capacidad de un yate de evacuar el agua de las velas después de una tumbada
en la que se meta el palo en el agua (knockdown).
El factor clave aquí es FR que más o menos describe cuando el momento adrizante es igual al momento escorante, con las velas apenas metidas en el agua.
Si el valor del momento adrizante es mayor que 1,5 veces el momento escorante a ese ángulo, el factor de recuperación se calcula utilizando la primera de las dos fórmulas, y si es inferior, la segunda.


Para embarcaciones con un ángulo de inundación inferior a 90º, el FKR toma el valor mínimo de 0,5.
Factor Desplazamiento-Eslora, FDL
Un desplazamiento ligero frente a la eslora de una embarcación de vela es comúnmente considerado una desventaja desde el punto de vista del control de la misma, por lo que es penalizado en el cálculo del STIX.
La fórmula es:

Evaluar las cualidades marineras de un barco solo en función de este factor sería injusto.
La experiencia ha demostrado que yates de desplazamiento ligero pueden de hecho soportar condiciones muy duras de tiempo, incluso condiciones de supervivencia, por ejemplo como ocurrió en la tristemente famosa Sydney-Hobart de 1998, o como ocurre en la Velux 5-Oceans o la
Volvo Ocean Race. Pero la Directiva de embarcaciones de recreo está pensada para todo tipo de
embarcaciones y todo tipo de tripulaciones,muchas veces consistentes en una familia de una pareja con hijos pequeños.
Cuando ocurre lo peor y la tripulación no puede hacerse cargo del barco,
el barco debe hacerse cargo de la tripulación.
El criterio es que en tales situaciones un barco muy sensitivo y de rápidas respuestas no es lo ideal.
En este factor FDL se incluye un factor de eslora, su sub-factor FL, que es función del factor básico
LBS. Esto es debido a que cuanto mayor la embarcación, más ligero es el desplazamiento relativo en embarcaciones de tipo normal. La fórmula está
pensada para arrojar un valor de 1,0 para un yate normal y se limita su valor a 0,75 como mínimo y 1,25 como máximo.
Factor Manga-Desplazamiento, FBD
Basándose en la investigación llevada a cabo en Gran Bretaña y los estados Unidos después del desastre de la Fastnet en 1979, se llegó a la conclusión que una gran manga en relación con un desplazamiento ligero acentúa el riesgo de vuelco e inversión por acción de las olas.
El casco es así mismo más estable en posición invertida, tendiendo a permanecer en esta posición durante períodos de tiempo que pueden ser largos y peligrosos.
Por contra, una relación manga-desplazamiento muy pequeña puede tener efectos negativos en la estabilidad de formas y tampoco es deseable, por lo que desviaciones importantes en ambos sentidos son penalizadas en este factor.
Las fórmulas que se aplican para este FBD son diferentes si el barco es estrecho, normal o ancho.
El sub-factor que gobierna esto es FB cuyo valor normal varía entre 1,45 y 2,2.
La fórmula a aplicar es:
Siendo:
Factor de escora por viento,FWM
Este valor no suele ser inferior a 1, valor que se alcanza tan pronto como el ángulo de inundación es de 90º o mayor, lo que suele ser el caso de la mayoría
de los veleros con cubierta, quilla lastrada, y aberturas normales,especialmente para las categorías
A y B. Cabría preguntarse entonces porqué se incluye este factor.
La razón para ello, una vez más, es que hay embarcaciones que se escapan de lo habitual.
Para las categorías C y D sí que puede ocurrir de una forma más habitual que el ángulo de inundación sea inferior a 90º. Por ello se establece que, en ese caso, la embarcación debe poder soportar la escora producida por las rachas de viento sin que se supere el ángulo de inundación.
Para obtener el valor de 1,tal embarcación debe soportar una racha de por lo menos 17 m/s (34 nudos) sin que tal ocurra.
Este criterio suele marcar la frontera entre embarcaciones de las categorías B y C.
Factor de Inundación, FDF
Este factor representa el riesgo de inundación en un vuelco de 90º (knockdown).
Es un factor relativamente sencillo, en el que se penaliza a las embarcaciones con un ángulo de inundación inferior a 90º.
El factor FDF da así una vez más un bono a las embarcaciones capaces de soportar una “tumbada”.
Vemos como el ángulo de inundación tiene una importancia relevante para obtener altos valores de STIX, influyendo en tres de sus factores (Antes en FWM y FKR).
El factor de flotabilidad, δ
Realmente este no es un factor, si no un sumando.
Tiene un valor fijo de 0 o de 5.
Este último valor se aplica a aquellas embarcaciones que son capaces de permanecer a flote en inundación, bien sea porque tienen cámaras de flotabilidad o porque tienen subdivisiones a base de mamparos estancos y además conservan un brazo adrizante positivo a 90º en estas condiciones.
El STIX da así a la flotabilidad en caso de inundación un valor extraordinario.
Pensemos en que podríamos alcanzar la categoría A (STIX 32) con una embarcación que tuviese un STIX de tan solo 27, que está en la zona media del abanico de la categoría B, simplemente dotándola de medios que hagan que se cumplan las condiciones anteriores, por ejemplo espumando convenientemente los cofres bajo los asientos y literas interiores (Si en esta condición cumpliese lo del brazo a 90º, claro está).
En todos los demás casos en que no se cumplan estas dos condiciones, el valor de δ es 0.
Otros aspectos a tener en cuenta
Antes de pasar a ver un ejemplo de cálculo de STIX y una lista de los STIX de varios modelos de embarcaciones actuales, quiero nada más indicar los límites inferiores que se tienen que cumplir para los ángulos de anulación de la estabilidad y de inundación para las diferentes categorías.

Algunas reflexiones sobre el STIX
Hemos visto como las características de estabilidad hasta los 90º son muy valoradas en el STIX y muy particularmente la alta incidencia del ángulo de inundación Por el contrario, el ángulo de anulación de la estabilidad, AVS, no se tiene en cuenta tantas veces o con la importancia conque tal vez se debería y, además, otros datos importantes ni siquiera se tienen en cuenta.
En opinión de Rolf Eliasson, opinión que comparto, el método STIX da una importancia demasiado relevante a la estabilidad debida a las formas y al tamaño (Tamaño grande y altos valores de GZ a 90º), en contraposición a unas buenas características de la curva GZ hasta el ángulo AVS, características que son independientes del tamaño.
El STIX no es todavía un sistema perfecto y adolece de no tener en cuenta varios aspectos también importantes para la seguridad.
Por ejemplo, podrían introducirse otros factores adicionales, con su valor también oscilando alrededor de 1, que tuviesen en cuenta otros conceptos tales como
la pérdida de estabilidad debida a la velocidad (peligro de partir de orzada, o ‘broaching’), el momento de inercia transversal (que tiene notable influencia en le período de rolido), la amortiguación de balance debida a las forma de los apéndices y sus efectos hidrodinámicos, o el cociente entre las áreas negativa y positiva de la curva de GZ (Es muy recomendable que este cociente sea inferior
a 0,2 para embarcaciones de la categoría A, por ejemplo).
Sin embargo es posiblemente el intento más completo y exhaustivo hasta el momento de reflejar las condiciones marineras de un velero en función de su estabilidad y flotabilidad, mediante un único índice.
Es una mejora sustancial sobre sistemas similares anteriores.
Vamos a ver ahora un ejemplo práctico de cálculo del STIX para dos embarcaciones de diferente tipología.
Ejemplo comparativo de cálculo de STIX
Vamos a ver ahora de una forma rápida el cálculo del STIX para dos veleros, uno más pesado y formas más clásicas y otro más ligero y de fondos más planos. Estas figuras han sido amablemente cedidas por la revista Professional Boatbuilder (http://www.proboat.com/) y han sido tomadas de su número correspondiente a Marzo del 2003.
El artículo, en el que en buena medida se ha basado este trabajo, fue escrito por Rolf Eliasson, que es coautor del conocido libro “Principles of Yach
Design” y propietario de la firma RE Yacht Design, AB, en Savedalen, Suecia.
Características de los barcos ROJO y AZUL:

Por último,vamos a ver la influencia de bajar el centro de gravedad,lo que mejora las características de la curva GZ.
Especial relevancia tiene esto hoy en día, en que las técnicas de construcción modernas permiten situar grandes pesos en el extremo de la orza, en forma de bulbo o similar.
Embarcaciones muy planas y de relativamente grandes mangas, pueden mejorar de esta manera su STIX.
Resultado de bajar 5 cm el C. de G. en el barco ROJO
Para terminar, recomiendo el estudio detallado de las norma ISO 12217-2 y su interacción con las demás normas, especialmente las correspondientes a Bañeras (11812) y Portillos, Ventanas y Escotillas (12216), ya que no puede aplicarse la 12217 sin el previo cumplimiento de estas.
Hojas de cálculo del STIX para ambos barcos
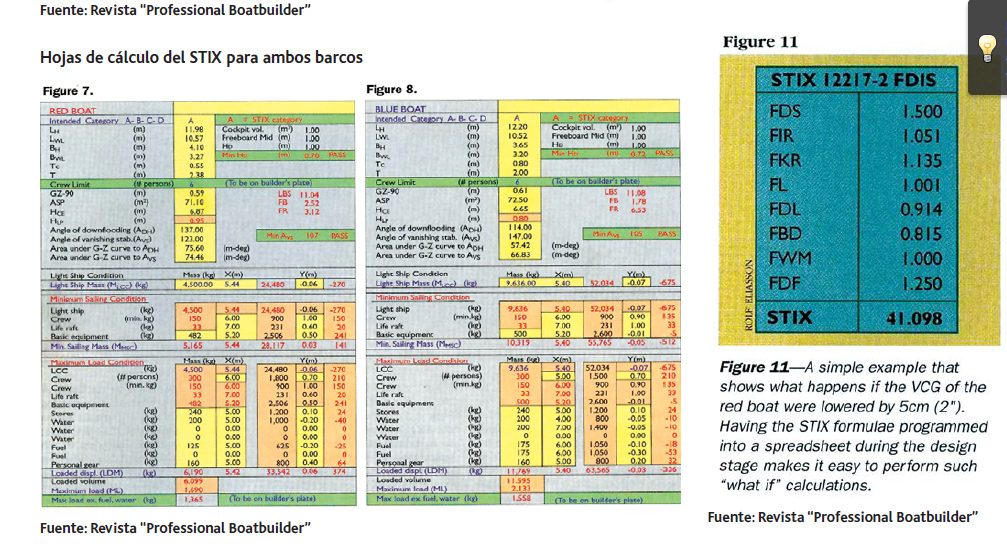
Fuente: Revista “Professional Boatbuilder”
Resultados del STIX en las dos condiciones de carga (MOC: Minimum Operating Condition) y MLC (Maximum Load Condition), para los
dos barcos.

Autor: Guillermo Gefaell, Ingeniero Naval
Web del autor: http://www.gestenaval.com/